クリーチャー・コスチュームのための機械式腕延長のデザインとプロトタイプの作成
概要
この記事では、クリーチャー・コスチュームのための機械式腕延長のデザインとプロトタイプの作成に直面した課題について説明します。目的は、自然な動きを妨げることなく、可能で機械的に安定したデザインを作成することでした。パントグラフ技術を研究し、Skeletonicsという日本のグループにインスパイアされました。その結果、これまでにない見事でユニークな創造物が生まれました。
目次
- フルスケールのデザインシルエット
- プロトタイピングフェーズ
- パフォーマーのためのスーツ作成の課題
- フレームワーク、材料、パフォーマンスの改善
- 結論
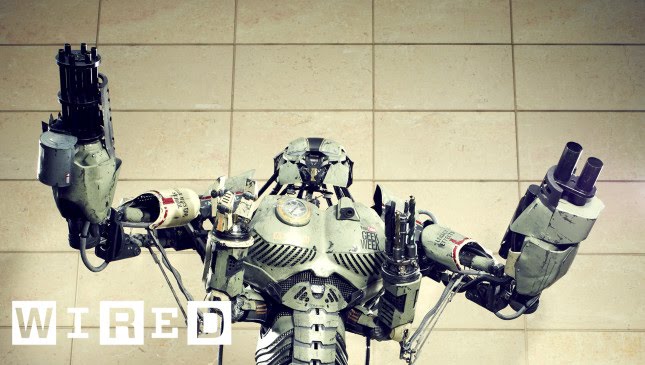
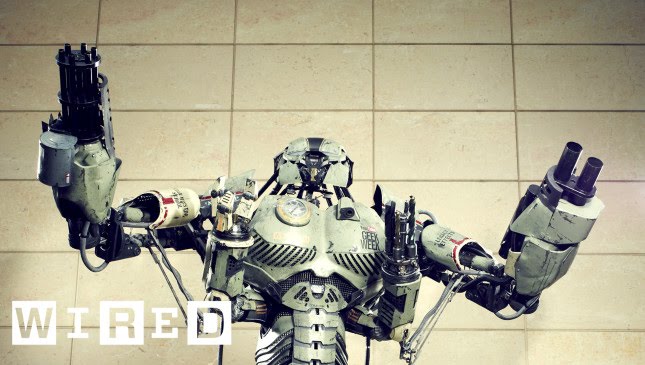
フルスケールのデザインシルエット
プロセスの最初のステップは、フルスケールのデザインシルエットを作成することでした。望ましい結果を明確にすると、プロトタイピングフェーズに移りました。プロトタイピングの目的は、安価な材料を使用してアイデアを素早く実現し、デザインが可能であり、望ましいシルエットを作成し、機械的なアプローチが確実であることを確認することでした。人間オペレーターと軽量で移動可能な材料の必要性に制限されました。
プロトタイピングフェーズ
プロトタイピングフェーズでは、ゴミ袋テストを使用してプロトタイプを作成しました。パントグラフ技術を研究し、Skeletonicsという日本のグループにインスピレーションを受けました。パラレログラム機構を使用して、クリーチャーの前腕が常にオペレーターの前腕と平行になるようにプロトタイプを作成しました。各スーツには独自の課題があり、ロボットスーツはより剛性があり、動きを制限しますが、生地駆動スーツはより伸縮性があります。
パフォーマーのためのスーツ作成の課題
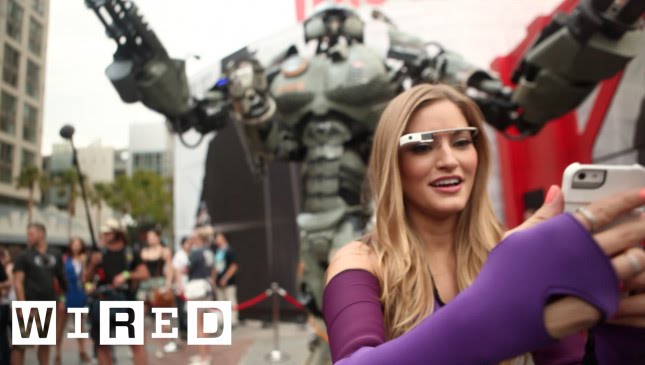
パフォーマーのためにスーツを作成する際の重要な要素の1つは、回転点がパフォーマーの肩と一致することを確認することでした。スーツの重量も課題であり、上部が重く、パフォーマーがスティルトの上にいたためでした。解決策は、パフォーマーの腕をロボットの付属品で着飾り、同期した動きと真のミラーリングを可能にすることでした。これにより、スーツの重量によって制限されることなく、パフォーマーが自然な動きをすることができました。
フレームワーク、材料、パフォーマンスの改善
スーツを作成するプロセスは、フレームワーク、材料、パフォーマンスを改善することによって行われました。すべての要素をバランスさせ、一貫したパッケージを作成する必要がありました。その結果、これまでにない見事でユニークな創造物が生まれました。機械式腕延長により、パフォーマーは自然かつシームレスに動くことができ、観客にとって本当に没入的な体験を作り出しました。
結論
クリーチャー・コスチュームのための機械式腕延長のデザインとプロトタイプの作成は、挑戦的でありながらも報酬のあるプロセスでした。パントグラフ技術を研究し、パラレログラム機構を使用することで、可能で機械的に安定したデザインを作成することができました。パフォーマーの腕をロボットの付属品で着飾ることで、自然な動きを妨げることなくスーツを作成することができました。その結果、これまでにない見事でユニークな創造物が生まれました。